概览
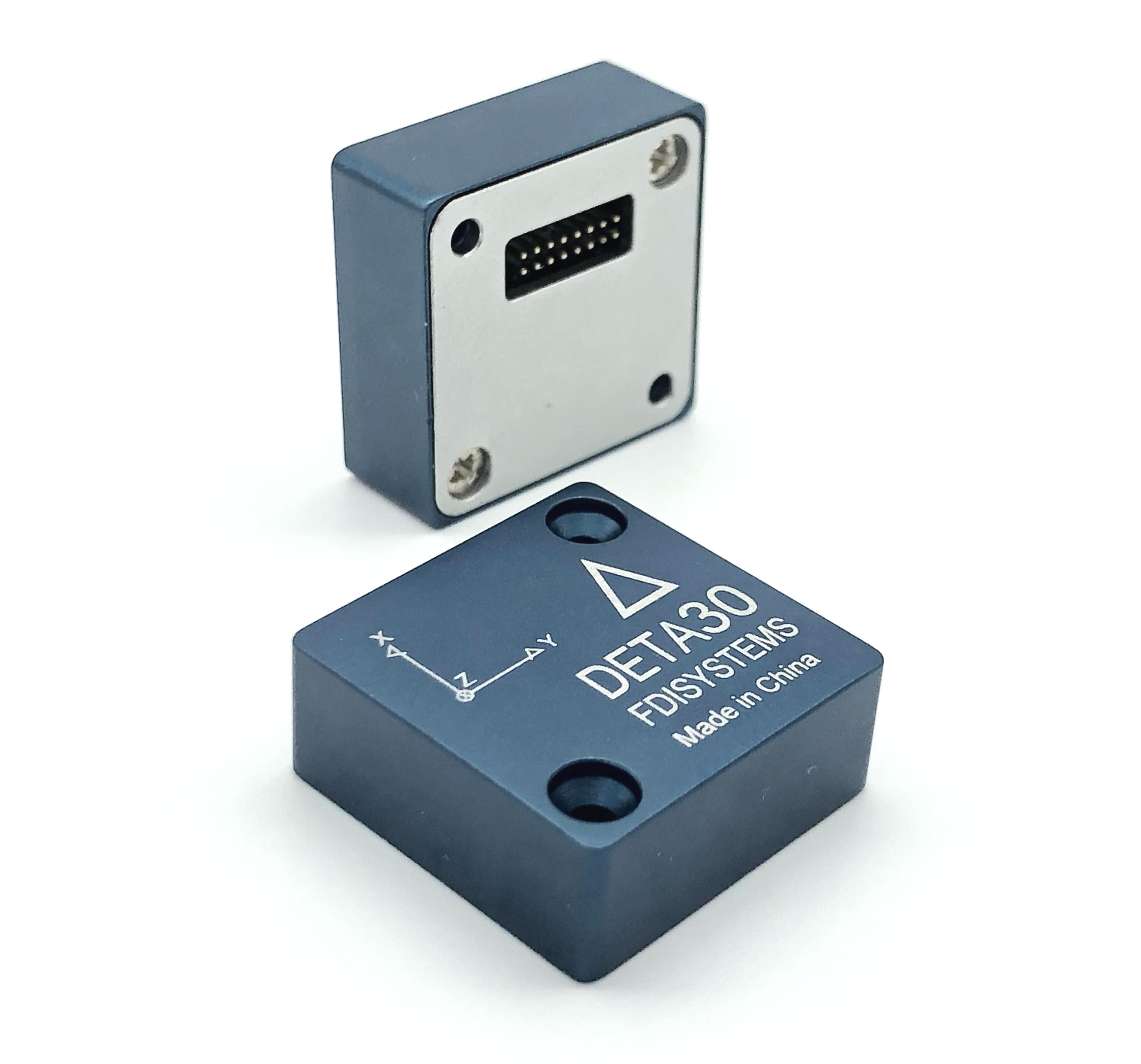
FDIsystems 推出了DETA30*系列一套完整的基于mems和石英陀螺的工业级微型惯性导航系统。该系列的特色是采用冗余传感器技术,融合了三颗零偏稳定性为2°/h的陀螺仪,具有更高的3D角度测量精度。 该系列包括IMU、VRS、AHRS和外接GNSS设备的GPS/RTK/INS组合导航解决方案,采用坚固的金属外壳,可以直接安装在PCB上。搭载行业先进的SPKF 非线性数据融合算法,经过专业的校准和-40℃~60℃温度误差补偿,算法具有抗磁干扰的能力,功能强大的界面软件方便即刻上手。该系列特别适用于移动机器人、无人机、无人驾驶、无人船、动中通、云台等应用。
特点
- 冗余航向陀螺技术,增强3D稳定性
- 稳定角度输出,航向角0.5˚ RMS, 姿态0.1˚ RMS
- 典型陀螺零偏稳定性 2˚/hr
- 零偏、刻度因子、正交性-40°-85°温度出厂标定
- 每个模块出厂提供校准检测报告
- 圆锥划船补偿、自适应SPKF
- 12自由度六轴陀螺仪、三轴加速度计、三轴磁力计
- 串口TTL/ CAN 接口
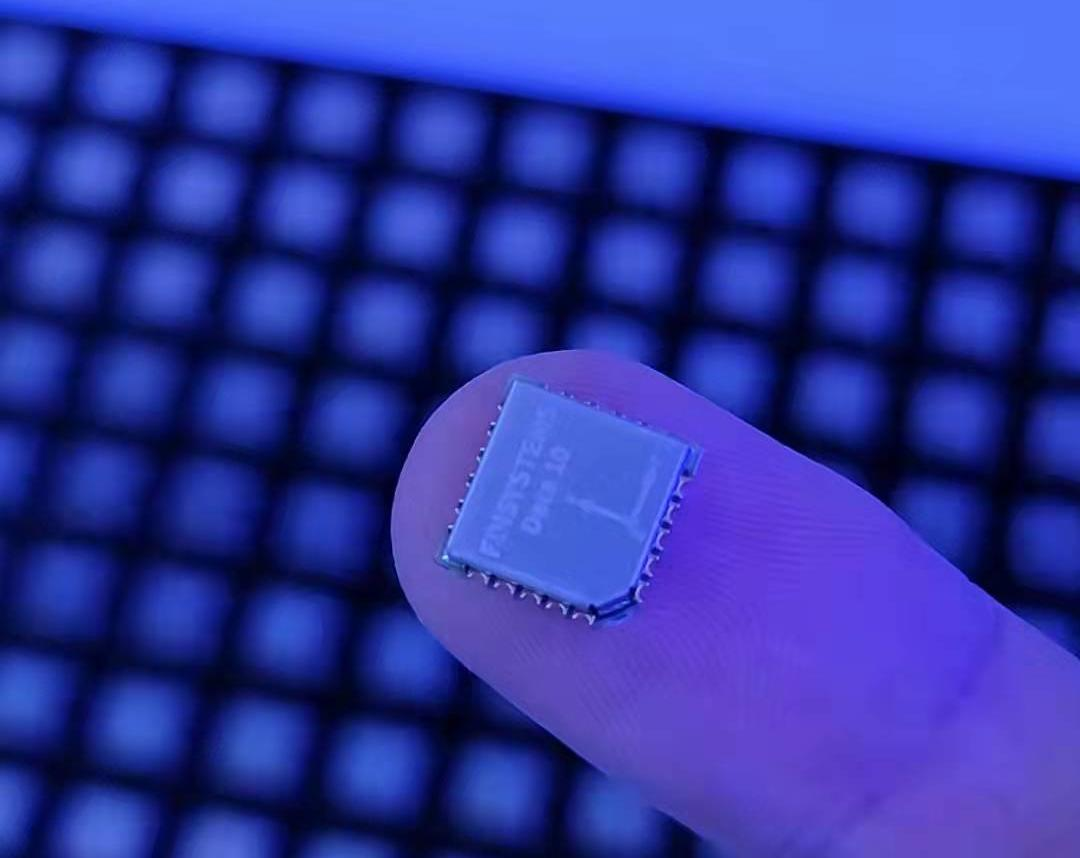
- 小尺寸、重量:22x22x8.5mm, 7grams
- ITAR-free 中国制造
配套GNSS接收器
DETA30系列提供了最紧凑和低功耗的解决方案,采用标准坚固的封装,提供硬件开发支持包,可轻松的集成到一个主机PCB上,并且支持SMT工艺。
参数
|
NAVIGATION
|
Deta30 V
|
Deta30 A
|
Deta30 N
|
|---|---|---|---|
|
俯仰/横滚 (静态)
|
0.05 ° RMS
|
0.05 ° RMS
|
0.05 ° RMS
|
|
俯仰/横滚 (动态)3 4
|
0.1 ° RMS
|
0.1 ° RMS
|
0.1 ° RMS
|
|
相对航向 1(静态)
|
<1 ° /hr
|
<1 ° /hr
|
<1 ° /hr
|
|
相对航向 1 4(动态)
|
2 ° /hr
|
2 ° /hr
|
2 ° /hr
|
|
绝对航向(磁辅助)2
|
-
|
0.5 ° RMS
|
0.5 ° RMS
|
|
绝对航向(GNSS辅助)3
|
-
|
-
|
<0.1° RMS
|
|
水平位置3
|
-
|
-
|
单点: 1.2m
RTK: 0.01m RMS |
|
速度精度
|
-
|
0.05 m/s
|
0.05 m/s
|
|
角度分辨率
|
< 0.01°
|
< 0.01°
|
< 0.01°
|
|
角度重复性
|
< 0.1°
|
< 0.1°
|
< 0.1°
|
|
IMU数据输出频率
|
400 Hz
|
400 Hz
|
400 Hz
|
|
导航数据输出频率
|
200 Hz
|
200 Hz
|
200 Hz
|
1 垂直参考模式,无磁力计,转台往复转动测试 25分钟航向漂移 <0.2°,连续航向转动单圈累计航向 误差<0.1° 可提供测试报告数据。
2 磁偏角补偿,适当的磁场环境和已经进行软磁和硬磁的补偿校准。
3 外接DGNSS接收机ubloxNEO F9P为例。
4 平面运动或者较小的3D运动。
2 磁偏角补偿,适当的磁场环境和已经进行软磁和硬磁的补偿校准。
3 外接DGNSS接收机ubloxNEO F9P为例。
4 平面运动或者较小的3D运动。
|
IMU
|
加速度计×3Axis
|
陀螺仪×6Axis
|
磁力计×3Axis
|
|---|---|---|---|
|
量程
|
±8 g
|
±400 °/s (扩展±2000 °/s) 1
|
±4900uT
|
|
零偏稳定性
|
< 0.4 mg
|
2 °/hr
|
-
|
|
线性度
|
< 0.1 % FS
|
< 0.1 % FS
|
< 0.1 %
|
|
噪声密度
|
75µg/√Hz
|
0.0028º/s /√Hz
|
140 µGauss/√Hz
|
|
带宽
|
500 Hz
|
300 Hz
|
250 Hz
|
|
正交性误差
|
±0.05 °
|
±0.05 °
|
±0.05 °
|
|
分辨率
|
< 0.5 mg
|
< 0.01 °/s
|
1.5 Milligauss
|
1 在3D低动态<400 °/s 运动时具有更好的精度。
|
MECHANICAL/ELECTRICAL
|
DETA30-V
|
DETA30-A
|
DETA30-N
|
|---|---|---|---|
|
Size
|
21.2x21.2x8.5mm
|
21.2x21.2x8.5mm
|
21.2x21.2x8.5mm
|
|
Weight
|
< 6.6g
|
6.6g
|
6.6g
|
|
Input Voltage
|
3.6V-5.5V
|
3.6V-5.5V
|
3.6V-5.5V
|
|
Current Draw
|
40mA @ 5 V
|
40mA @ 5 V
|
45mA @ 5 V
|
|
Max Power Consumption
|
200 mW
|
200 mW
|
225 mW
|
1 在3D低动态<400 °/s 运动时具有更好的精度。
特性
接口
环境
Serial TTL*2 & CAN ,GPIO , 数据同步引脚
操作/校准 温度 -40°Cto+85°C
MTBF (推算) 50,000 h
MTBF (推算) 50,000 h
输入/输出
协议
FDILink Binary, FDILink ASCII, NMEA
输出数据
欧拉角 (Yaw, Pitch, Roll); 四元数; 位置; 速度; 方向余弦矩阵;
加速度,角速度,磁场向量
加速度,角速度,磁场向量
融合引擎
自适应非线性Sigma-point 卡尔曼滤波器; 用户可配置辅助观测源 参数在线估计;
野值和异常检测隔离; 自适应滤波
野值和异常检测隔离; 自适应滤波
外部辅助
GNSS, RTK,气压计,空速管, 里程计
指令配置
支持串行指令配置:重启、校准、模式切换等
数据同步
Sync-In, Sync-Out I/O pins; GPS PPS, 30 ns RMS, 60 ns 99%



寻求报价

软件
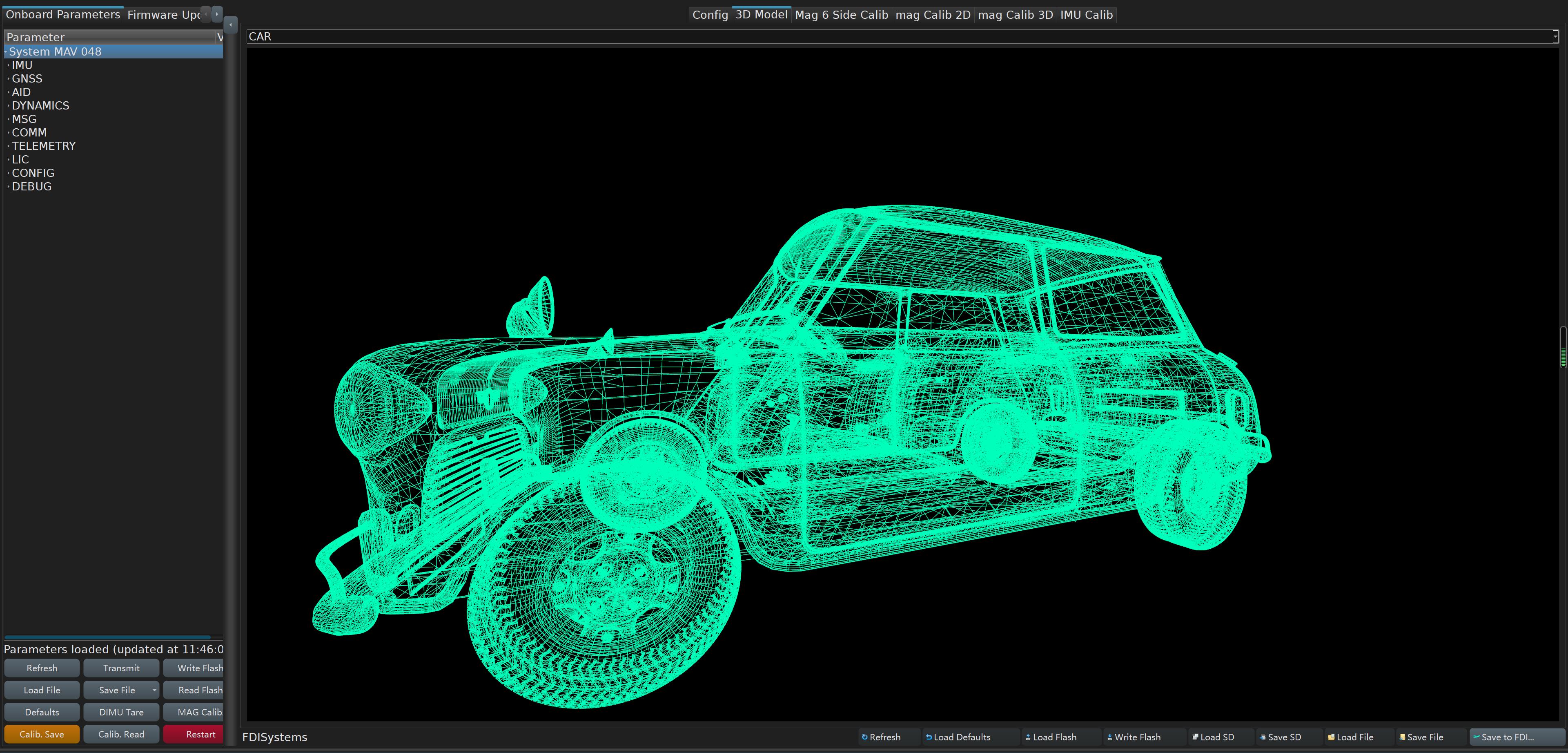
FDICenter 界面软件
强大的用户友好的GUI可以方便的执行配置修改参数以及校准和数据LOG和显示功能。提供 硬 件 封 装 方 便 开 发 , 提 供 C/ C++/linux ROS/MatLab simulink 环境的SDK等开发工具。
自动化校准工具
为了用户更快的完成导航系统的部署,参数标定,通过内置的算法可以快速的实现2D/3D软磁硬磁校准、IMU载体安装俯仰、偏航误差角、杆臂以及天线的安装角度的快速免仪器自动标定,同时集成了里程计自动标定算法。
定制解决方案
提供包含惯性、卫星、视觉、激光、二维码、SLAM等全方位的导航系统解决方案,助力客户实现导航制导和控制的闭环;尺寸和包装的个性化定制;外部辅助传感器方案定制;界面、协议、特殊校准个性化定制支持。
我有疑问