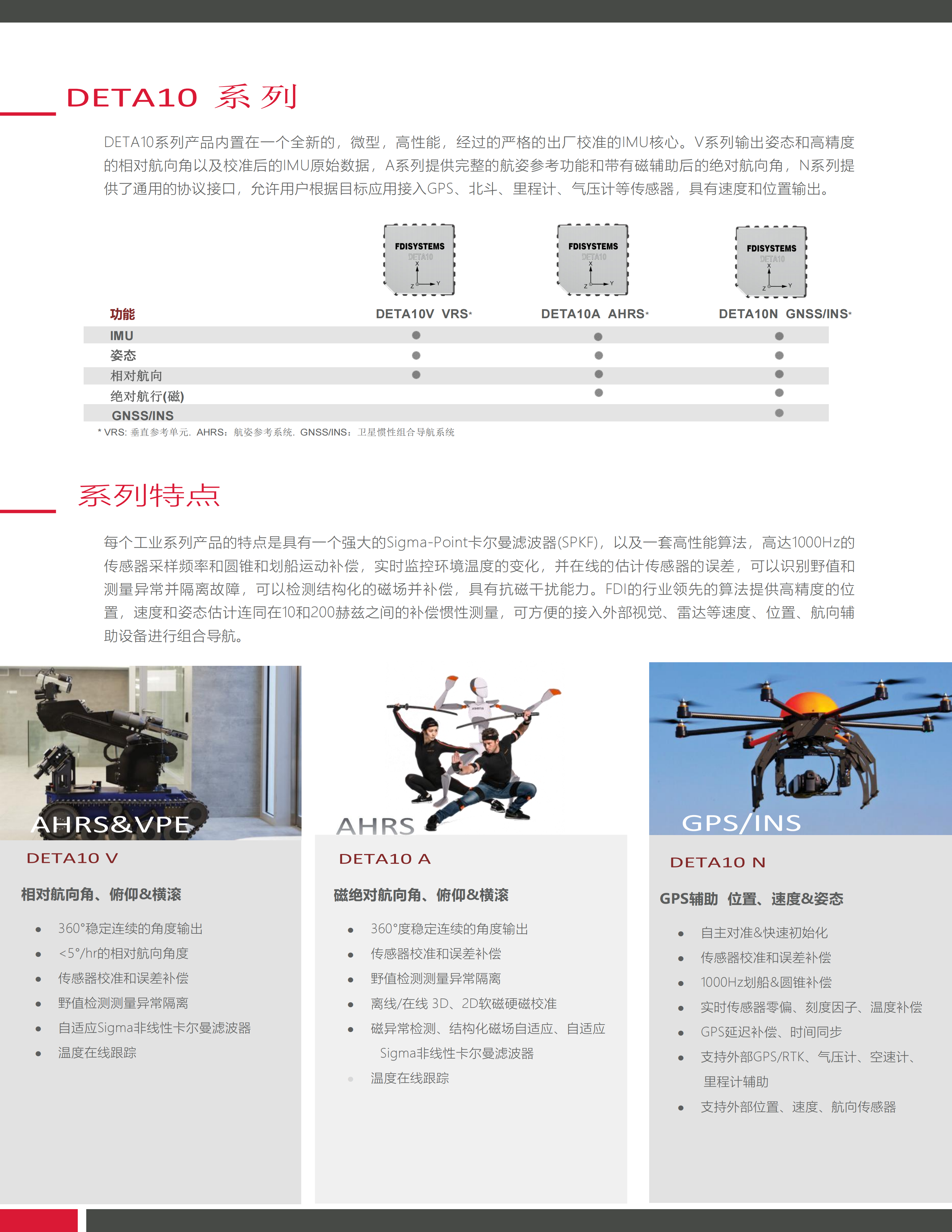
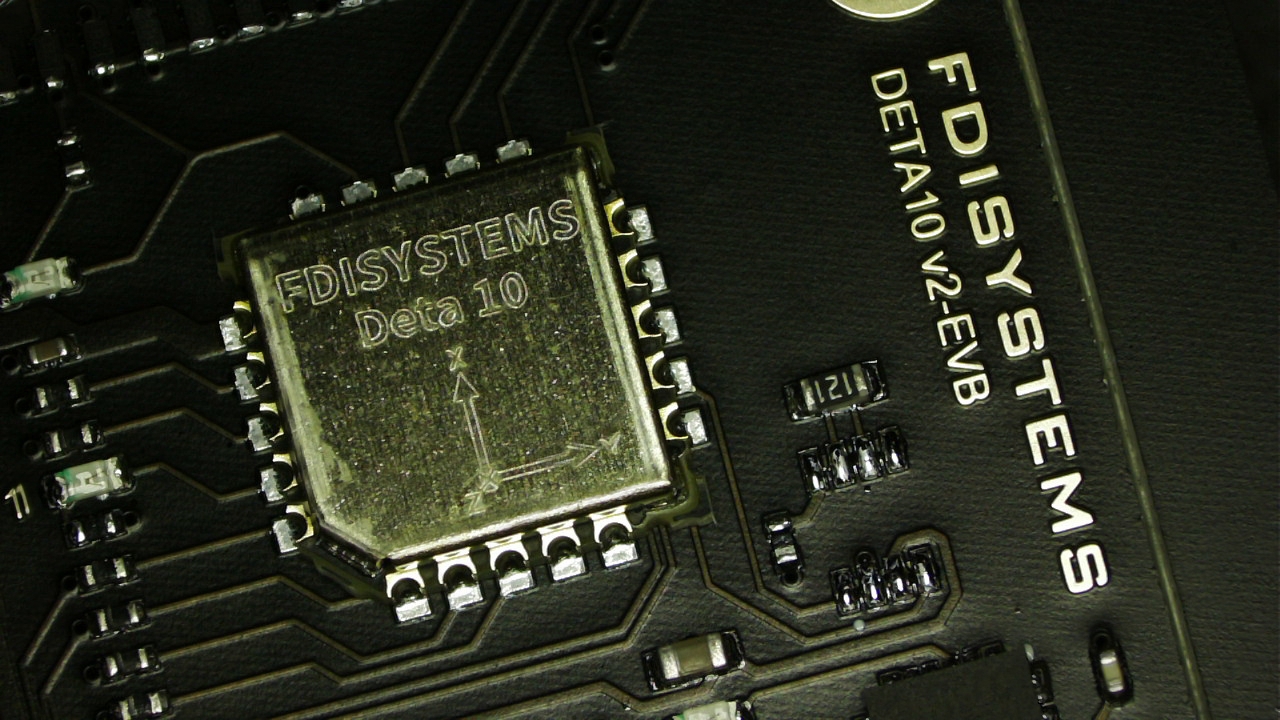
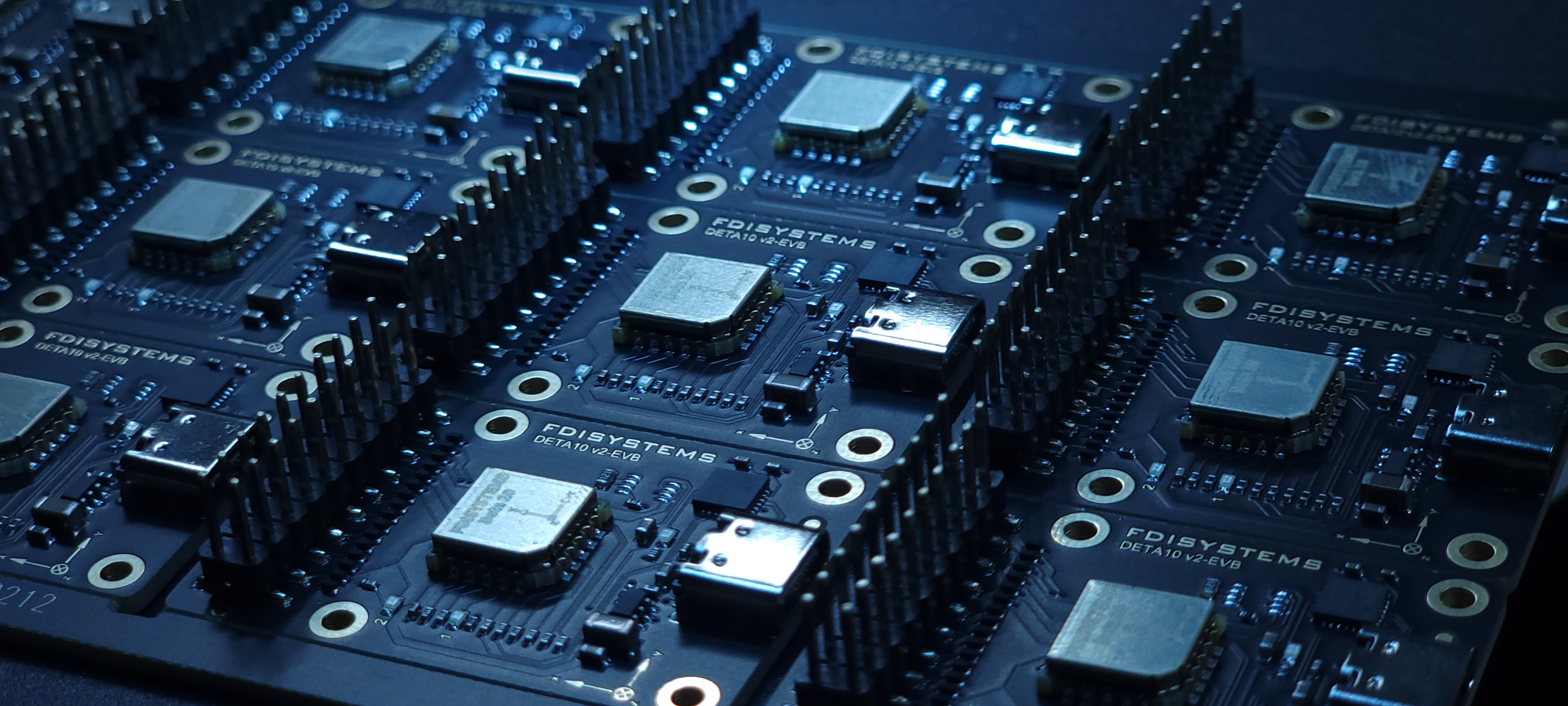
FDIsystems 推出了DETA10*系列一套完整的基于mems的芯片级微型惯性导航系统。该工业系列包括IMU、VRS、AHRS和GPS/INS解决方案,可用于表面安装SMT和加固包装两种选择,采用行业先进的非线性数据融合算法,经过专业的校准和误差补偿、可在线的进行传感器误差补偿,具有抗磁干扰的能力,非常适用于对成本和尺寸有限制的领域(SWaP-C )。
超小尺寸& 标准PLCC20 封装支持SMT工艺
稳定角度输出,航向角0.5˚ RMS, 姿态0.1˚ RMS
典型陀螺零偏稳定性 5˚/hr
零偏、刻度因子、正交性出厂标定
圆锥划船补偿、自适应SPKF
串口 TTL, SPI & CAN 通讯接口
9.5mm×9.5mm×2.5mm , < 1 g
ITAR-free